eVTOL需要怎樣的動力系統?
3月27日工信部聯合三部委發布《通用航空裝備創新應用實施方案2024-2030年》[1] 提出未來以電動化爲主供、兼顧混動等其他路线,加速電推進系統的技術突破,加快渦軸、渦槳發動機的研制以及100-200馬力活塞發動機批量交付,同時开展400kw以下混動系統研制、250kw以下電驅動規模化量產和500kw級產品驗證,我們認爲動力系統是eVTOL發展的關鍵。
摘要
市場多以競爭激烈的新能源車電機類比eVTOL電機,但我們認爲eVTOL動力系統相對壁壘更高,且價值量佔比較大,未來有望出現產業龍頭。汽車電機與eVTOL電機的區別在於eVTOL電機、電控需要合並進行適航,這一定程度上提升了市場潛在集中度。此外電機本身價值量價高,全生命周期內需更換3~4次,我們預計整體電機成本佔比或達到20~30%。
eVTOL動力系統認證要求高,具備先發優勢。TC型號合格證難度較高,這需要供應商與整機廠在工藝細節、技術選擇等多維度上充分適配且從較早期便开始合作,而一旦認證通過整體合作粘性相對較高,整機廠基於時間成本和安全擔憂等往往更換供應商的意愿較低。eVTOL電機相較汽車電機而言投入高、周期長、難度大限制了傳統汽車電機廠商的參與意愿,但也構成了已參與廠商的先發優勢。
eVTOL純電航程普遍較短,若eVTOL商業化進度超預期混動或有望成爲有效補充。國內大多數整機廠採用純電技術路线但航程普遍在100km左右,海外諸如本田、Elroy Air的chaparral C1採用混動技術可以實現400-500km航程。我們認爲未來或以純電爲主,兼顧混動等其他路线。
eVTOL動力部件主要分爲電機、電控、高壓部件、冷卻系統、推進器等,高推進功率下適配高電壓體系,設計、制造端均存在較高難度。以電機電控爲例,其需要遵循DO-178/D0-254/D0-160的適航要求,此外電控的高壓耐受性和安全性、電機的高扭矩密度/高功率密度、推進器螺旋槳葉片設計/材料等均構築eVTOL動力系統的結構難點。
風險:政策支持不及預期,產業化進度不及預期
正文
核心觀點
觀點1:我們認爲eVTOL動力系統價值量大且壁壘較高,競爭廠商較少未來國內有望走出產業龍頭
市場大多以競爭激烈的新能源車電機類比eVTOL電機,但我們認爲eVTOL動力系統與汽車動力系統至少存在以下兩點不同:
eVTOL動力系統集成度更高,或更多以類似汽車“多合一”形式出現:新能源汽車電驅動採購分爲電機、電控、減速器等,多數零部件廠商供應單品爲主。但eVTOL電機/電控需合並進行適航認證,這一定程度上提高了供應商在產業鏈能夠參與的潛在價值量。此外考慮到本身動力系統適航認證嚴苛,未來eVTOL動力系統或區別於汽車電機較爲分散的格局。
eVTOL動力系統的價值量較大,未來低空飛行是萬億級賽道,動力系統的核心公司同樣值得期待。工信部聯合三部門發布《通用航空裝備創新應用實施方案(2024-2030 年)》提出2030年低空飛行形成萬億級市場規模。對於動力系統而言,我們預計其佔整機成本約爲20~30%,其中單電機價值量約10萬元左右,配套電控等價值量有望升至10~15萬元,此外全生命周期中還需要進行3-4次的電機更換。
觀點2:我們認爲eVTOL動力系統的先發優勢較爲突出
eVTOL的動力系統壁壘主要體現在其要求較高(航空級>車規級>工業級),需要符合DO-254、DO-178等一系列航空標准和規範。從產品的直接技術參數來看,eVTOL電機在扭矩密度、功率密度等方面也較傳統汽車電機有更高的要求(詳見下文)。此外TC型號合格證難度較高,這需要供應商與整機廠在工藝細節、技術選擇等多維度上充分適配且從較早期便开始合作,而一旦認證通過整體合作粘性相對較高,本質來看是認證的時間成本和更換的安全隱患擔憂等構築了其先發優勢。從參與廠商來看,全球範圍內主要是羅羅、賽峰等原航空發動機廠商切換至電動飛行器動力系統以及部分科研機構等,eVTOL動力投入高、周期長、難度大且在前些年商業化不明朗的情況下也限制了傳統汽車電機廠商的參與意愿,但也因此構築了已有廠商的先發優勢。
觀點3:eVTOL目前純電航程普遍較短,若商業化進度超預期混動或有望成爲有效補充
目前來看,國內大多數整機廠採用純電技術路线但航程普遍在100km左右,海外諸如本田、Elroy Air的chaparral C1採用混動技術可以實現400-500km航程。對比新能源汽車混動及純電技術路线的變化,我們可以看到早期由於混動較爲耗油,且以燃油車架構爲基礎布置電力電子架構和電池較爲復雜且帶電量不足導致混動路线受到制約。但隨着混動的持續發展,我們看到帶電量的提升和成本的持續下行,混動在續航方面的優勢也持續得到市場認可。我們認爲當前eVTOL的動力技術市場選擇與早期的新能源汽車具有一定的相似性,若低空飛行在空域改革、基礎設施建設、法律法規等進展超預期的情況下,我們認爲混動技術路线或有望成爲eVTOL發展的有效補充。此外《通用航空裝備創新應用實施方案(2024-2030 年)》也提到以電動化爲主攻方向,兼顧混合動力、氫動力、可持續燃料動力等技術路线,加快航空電推進技術突破和升級。
1、爲什么eVTOL需要電動化?
eVTOL(Electric Vertical Take-Off and Landing電動垂直起降器)區別於傳統直升機,採用電推力系統替代傳統發動機,如果是混合動力也被成爲HVTOL(Electric Vertical Take-Off and Landing)。回答標題的這個問題,實際上是在對比eVTOL和傳統直升機的優劣,我們認爲相較於傳統發動機而言,電動化對於飛行器而言具有諸多優勢,我們選取同爲5座機型的沃蘭特E20 eVTOL和傳統直升機羅賓遜R66進行對比:
整體而言,eVTOL在續航、承載能力等方面仍然較直升機具有一定差距,但在噪音、效率、成本、設計自由度方面具有更大優勢,也有望成爲未來節能減排、城市空中交通的主流選擇。
節能高效:電推動系統的效率遠勝燃油動力效率。動力系統的效率等於各個子模塊的效率乘積,根據《分布式電推進飛機電力系統研究綜述》[2]目前來看,電池、電機的效率幾乎都在95~98%,螺旋槳效率再80-85%,而傳統燃油動力推進效率多爲40%左右,eVTOL相比於傳統燃油動力而言具有天然的高效優勢。
設計自由:電推動系統的尺度效應是eVTOL可以進行分布式動力系統設計的前提。相較於傳統動力形式,電推動系統具有尺度效應(功率相對尺度是獨立的)的天然優勢,即不論電機電控的功率是否分散,他們的功率比重和效率基本不變,但縮小燃油發動機尺寸其質效比會受到很大影響。電推動系統的尺度效應使得eVTOL大大增加了總體設計的自由度,突破傳統設計框架,也是eVTOL可以採用分布式動力架構的前提。
低成本:eVTOL無需較高的運營成本。直升機的運營成本包括燃油成本、駕駛員成本、發動機維修成本、保險等,而eVTOL的動力爲電力成本天然較燃油成本更低,此外無需發動機維修成本,而隨着動力電池能量密度的進一步升級和成本的進一步下降,因此在未來實際運營的角度來看,eVTOL具有更高的運營性價比。
低噪音:電推動系統的噪音來源天然較少,低噪音是未來城市空中交通的基礎。新能源汽車噪音遠低於傳統燃油車,飛行器同理。以直升機爲例,其噪音來源爲旋翼破空噪音、發動機噪音以及尾翼噪音,但eVTOL採用電推力系統作爲動力,並無發動機噪音。我們對比5人座的直升機和eVTOL,可以看到羅賓遜R66的噪音譽爲80-95分貝,而E20的起降艙內噪音小於65分貝,根據交通部發布的《機動車運行安全技術條件》汽車(純電動汽車、燃料電池汽車和低速汽車除外)駕駛人耳旁噪聲聲級應小於等於 90dB(A)[3]。eVTOL的終極暢想在於城市空中交通,因此低噪音是其運行的合理前提。
圖表1:eVTOL與直升機的對比
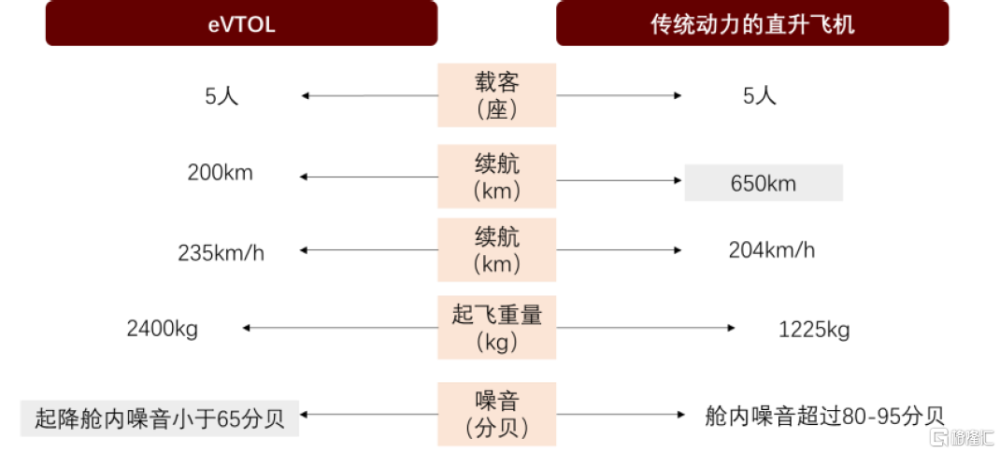
注:以沃蘭特E20與羅賓遜R66的5座型直升機進行對比 資料來源:公司官網,中金公司研究部
2、eVTOL需要怎樣的動力系統?
典型的eVTOL動力系統構型以及電力電子架構
eVTOL的電推動系統普遍採用分布式電推進設計技術,具體來看單個動力系統主要是由電機、電控、散熱器、推進器等模塊組成,其中電機是核心動力單元。分布式電推進系統(DEP)是由多個電機驅動分布在機翼或者機身上的螺旋槳/涵道風扇來作爲推進器的動力裝置,進而優化機體周圍流場降低阻力且減少噪音,例如德國Lilium的JET eVTOL飛行器採用36個分布式電推動傾轉涵道風扇來作爲推動系統。就單個動力裝置而言,電推進技術通過高功率密度電機帶動螺旋槳/涵道風扇旋轉進而提供飛行動力。而動力系統設計的關鍵主要是追求高功質比(功率/質量)電機和小型化電驅的可靠性,以及高電壓下的電機內部絕緣、結構強、散熱等問題。
圖表2:電動飛機的動力系統示意圖(羅羅公司150kw電機的示意圖)
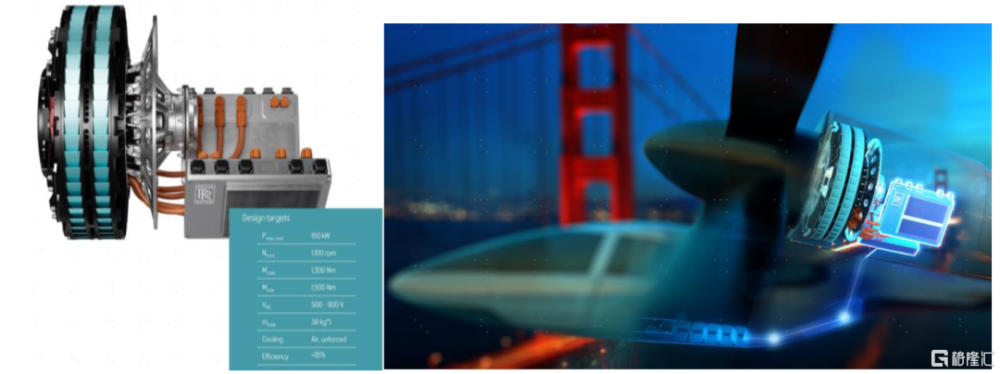
資料來源:羅羅公司官網,中金公司研究部
圖表3:eVTOL動力系統的電力電子架構
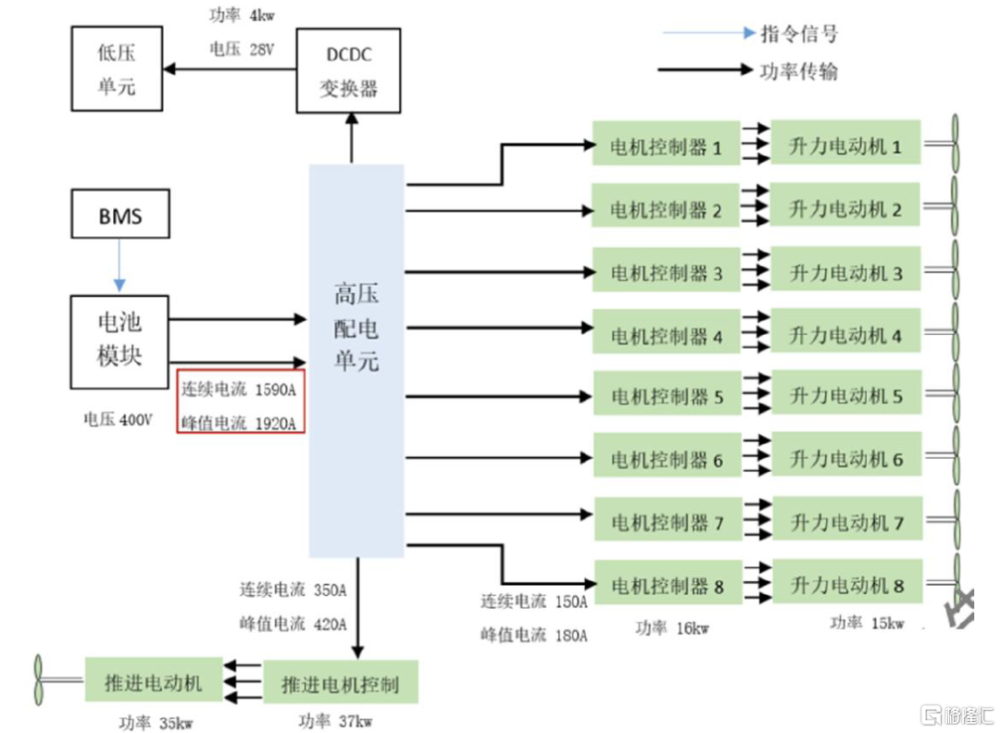
注:僅以某電壓平台爲例 資料來源:臥龍電驅官網,中金公司研究部
路线之辯:工信部發文未來主攻純電,兼顧混動及氫動力等其他路线
類似新能源汽車混動路线在動力電池技術突破前是提升能量密度的重要手段,未來或有望以純電爲主,兼顧其他路线。復盤新能源汽車的動力技術演進路线,我們可以看到在早期電池性能尚未達到理想狀態的時候混動是實現長續航歷程的較優選擇。當前來看,國內多數eVTOL採用純電路线,但海外本田、Horizon Aircraft等也通過混動技術來實現長距離航程,航程可達300-500km,而純電的航程多數爲50-250km左右。近期工信部與其他三部門聯合發布的《通用航空裝備創新應用實施方案 (2024-2030 年)》开展 400kW 以下混合推進系統研制;推進 250kW 及以下航空電機及驅動系統規模化量產,以及 500kW 級產品應用驗證,並提出以電動化爲主攻方向,兼顧混合動力、氫動力、可持續燃料動力等技術路线,加快航空電推進技術突破和升級。
圖表4:混動及純電的航程和速度散點圖(紅圈中的爲混動技術路线,其余爲純電)
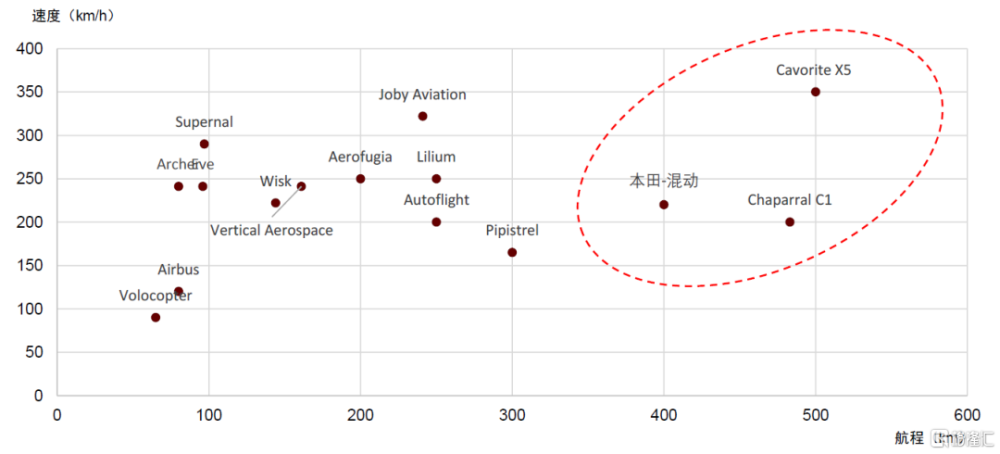
資料來源:各公司官網,中金公司研究部
純電:純電推進系統主要由電池和電推力系統組成,不需要發動機,而也正是由於不需要發動機的特點使得eVTOL具有零排放、低噪音等衆多優點。短期來看,由於電池技術制約飛行器載重、航程等難以突破較長距離,但隨着固態電池、鋰金屬電池等進一步突破,純電技術路线也有望打破此前掣肘。
混動:混動的垂直起降飛行器又稱爲HVTOL,是由發動機和電機共同作用的推進系統,一定程度上類似混動汽車的動力系統架構。一般而言,根據發動機和電機的工作關系可以講其混動類型進一步劃分爲串聯結構(耦合關系)和並聯結構(解耦關系),其中核心的區別在於電機與發動機是否解耦。
並聯:發動機和電機共同驅動推進器(螺旋槳/涵道風扇),電機主要是起到蓄能及引擎輔助。這樣的結構優點在於當發動機未能在最佳工況點運行,電機可以提供不足的功率,但如果發動機本身的做工超過飛行所需,則電機可以吸收多余能量,因此整體的推動系統效率較高。但缺點在於發動機的存在使得傳動機構仍然復雜,一定程度上制約了混動系統的綜合性能。一般的工作模式爲,在垂直起降階段發動機和電機共同提供動力需求,當達到巡航階段,電機切換至輔助模式或者蓄能模式。
串聯:發動機不直接功能,爲電機提供能量。串聯結構主要是通過渦輪發電機驅動來爲分布式電推力系統的多個電機提供動力,這樣的結構雖然相對更爲復雜,但是卻大大提升了整體飛行器結構設計的自由度。空客的Airbus和NASA的N3-X均採用這樣的技術路线。
圖表5:分布式電推進系統結構
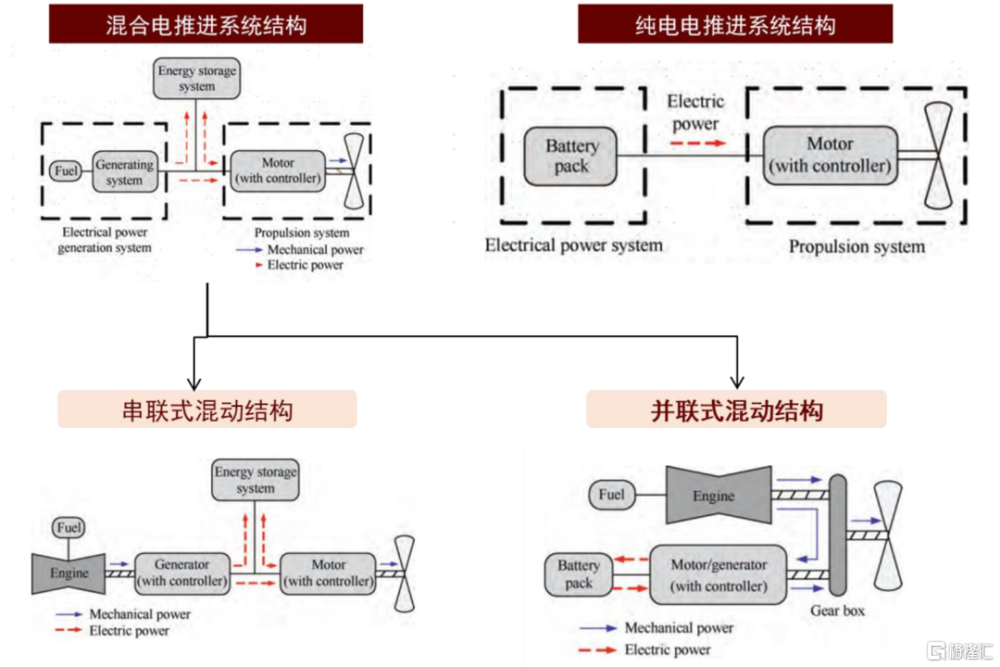
資料來源:孔祥浩等. "分布式電推進飛機電力系統研究綜述." 航空學報 39.1(2018):17.;中金公司研究部
#1電機:設計核心在於大扭矩密度和大功率密度以提升推重比
電機是電推進系統實現大推重比的關鍵。通常2噸重的飛行器配8只電機(從安全性角度需要冗余)、整體電推進系統的質量可以達到飛行器起飛質量的20%以上。eVTOL電機要求功率密度、轉矩密度高,主要採用永磁電機技術,並且與新能源電機相比,其性能和可靠性要求更高:
eVTOL電機設計的核心要點在在於高功率密度、高扭矩密度,電動飛機功率密度與高端汽車電驅接近,但是扭矩密度遠超傳統汽車。電動飛機的電機特點爲低速高扭,我們以羅羅150kw的EPU電機爲例,我們測算其扭矩密度約爲34.2N·m/kg,而汽車電機領域代表性的埃安汽車的誇克電驅扭矩密度約爲14.8Nm/kg,不到羅羅的1/2,此外松正、EMARX的扭矩密度也多爲10-20Nm/kg,但主流電驅動及匯川技術的扭矩密度約爲10Nm/kg左右。此外新能源車電機也難以滿足飛行器電機的高帶寬轉速控制等需求特點。
圖表6:電動飛機的電機相較於汽車電機的要求在於相同功率情況下的單位扭矩密度更高
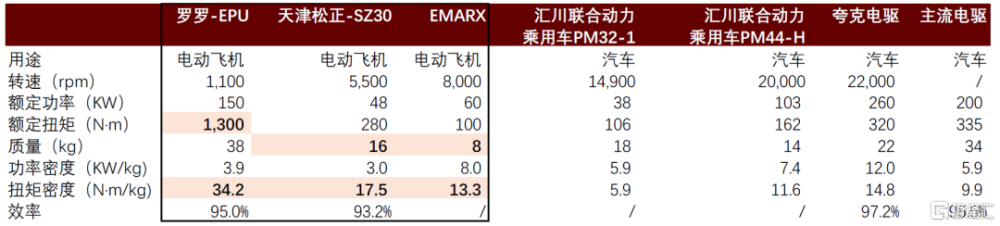
注:松正電機的功率和質量範圍取其max值進行計算 資料來源:各公司官網,中金公司研究部
不同功率的應用場景有所不同,從特種應用無人機到物流配送無人機,再到eVTOL整體的功率等級不斷提升。我們認爲4kw-30kw主要爲小功率產品,50-175kw左右爲中功率產品,200kw~2-10MW爲大功率產品,其中小功率主要應用於無人機、物流配送等,代表性公司主要有EMARX等;中功率產品則主要應用於未來城市空中交通的多座eVTOL,代表性的電機公司主要有賽風(SAFRAN)、羅羅(RollsRoyc);大功率產品主要用於未來的直线飛機,代表性公司有Magnix。
圖表7:不同功率電機對應的下遊需求

資料來源:臥龍電驅官網,中金公司研究部
當前eVTOL電機大多爲軸向/徑向電機,未來飛行器電機的“聖杯”爲超導電機。eVTOL的電推動系統的電機主要爲永磁同步電機,而永磁同步電機有主要分爲軸向磁通電機和徑向磁通電機兩類。其中軸向磁通電機的定子和轉自部分軸向相對配置從而保持徑向長度一致,而徑向磁通電機則講轉自裝配於定子內部,從而保持軸向長度一致。其中軸向磁場永磁電機有更短、更直接的磁通路徑,效率和功率密度更大,也因其高緊湊性及高轉矩密度受到廣泛關注。我們看到目前國內外軸向磁通電機廠商的扭矩密度和功率密度仍然較爲出色。
圖表8:軸向磁通電機與徑向磁通電機結構對比
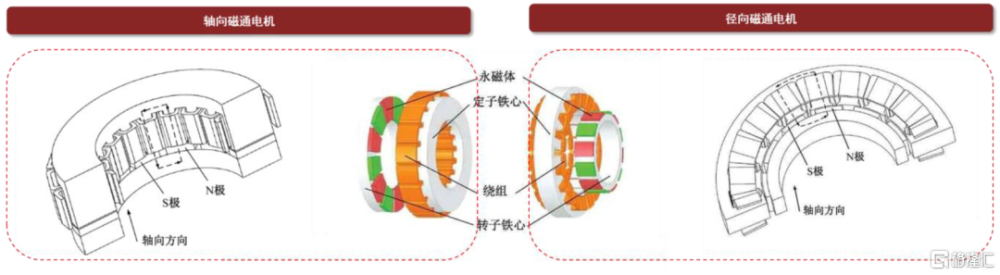
資料來源:EDC電驅未來,中金公司研究部
圖表9:軸向磁通電機參數
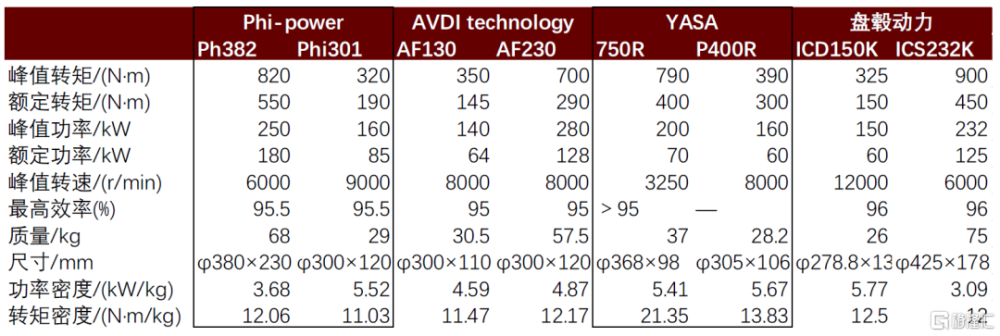
資料來源:關濤,劉大猛,何永勇.永磁輪轂電機技術發展綜述[J].電工技術學報,2024,39(02),中金公司研究部
超導電機是電動飛行器的電機聖杯,全超導電機的功率密度具備超過25kw/kg的潛力[4]。超導電機本質是電勵磁無刷同步電機,但繞組均有超導线材制成,從而獲得遠超傳統電機的功率密度和效率。根據《航空動力期刊》NASA曾爲N3-X通過安裝在機頭的兩個渦輪發動機驅動4台超導電機發電,每台發電機在爲3-~4台功率爲2~2.5MW的超導電機供電,整體的推進功率可達35MW。但超導電機的成熟應用仍然面臨諸多問題,例如超導技術高度依賴冷卻系統,進而實現超導狀態但也同步影響電機的可靠性等問題。此外大功率、高效率的電控技術也有待突破。
圖表10:eVTOL電機類型及其功率參數
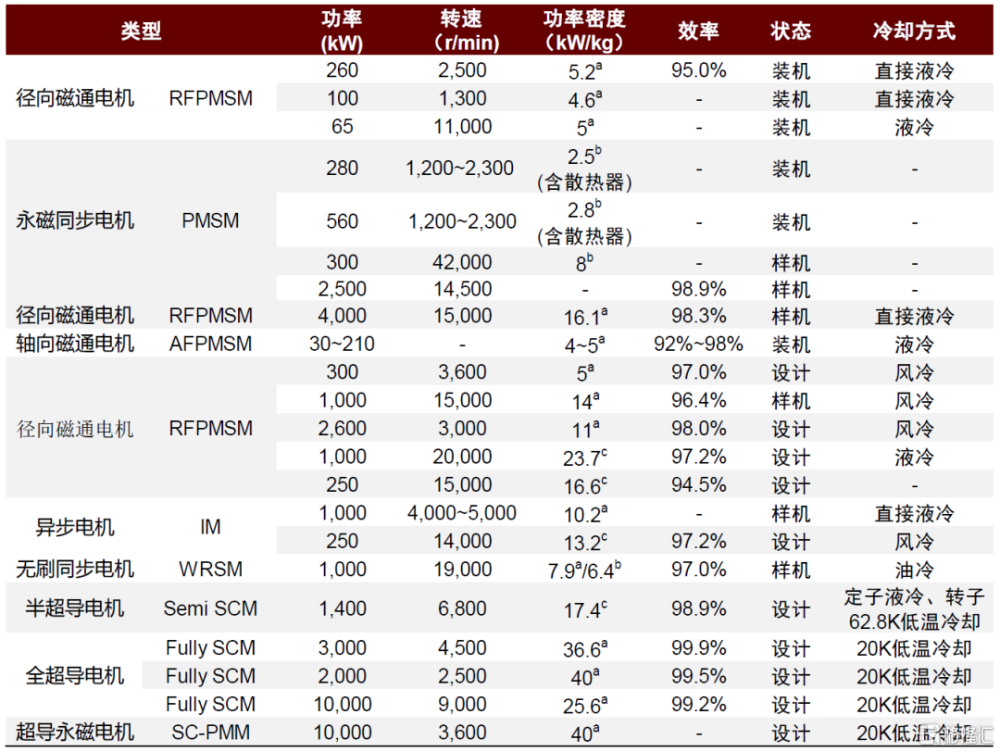
注:“a”表示根據電機總重量計算的功率密度;“b”表示根據電機及電機驅動器總重量計算的功率密度;“c”表示根據電機有效材料重量計算的功率密度
資料來源:張卓然,陸嘉偉,張偉秋,等.飛機電推進系統高效能電機及其驅動控制技術[J/OL].中國電機工程學報[2024-03-30,中金公司研究部
#2 電控及高壓部件:高功率推進系統也要求電控及相關部件匹配高電壓體系
在電動飛機的設計中,較高的推進功率也要求更高的電壓等級通過小電流以克服线纜重量過大和產熱等問題,而高電壓也對電控以及相關的高壓部件提出了更高的要求。根據臥龍電驅官網,小功率飛行器電機約爲4kw-30kw,配套電壓爲100v/350v;中功率飛行器電機功率約爲50-175kw,配套電壓爲600v/800v;而大功率飛行器電機功率約爲200kw~2-10MW,其配套電壓爲700V~1000v左右。而電壓等級的提高對於直接使用高壓的電驅動系統提出更高的要求,不僅要求其能夠承受較高的電壓衝擊,也需要在電壓瞬時變化以及電壓浪湧等情況下的具備耐壓能力。此外高壓系統下,電控容易出現電弧和電暈,且對线路保護也有更高的要求。
電控:電控的开發需要滿足適航標准電驅系統的正向开發流程,主要是滿足軟硬件的高可靠性的系統設計需求。分布式電推進系統中電控裝置的重量佔整體電氣系統總重量超過30%,直接影響飛機的飛行效果和運動能力,因此需要適應更嚴格的適航標准,電控的適航標准主要遵循DO-178、D0-254、D0-160。此外電機與電控的對應關系也並不完全是一對一,以羅羅的兩款飛行器電機爲例,其150kw的EPU主要由一套電機和兩個電控組成,350kw的飛行器EPU則由一套電機和四個電控組成。
圖表11:電機控制器的適航开發過程示例
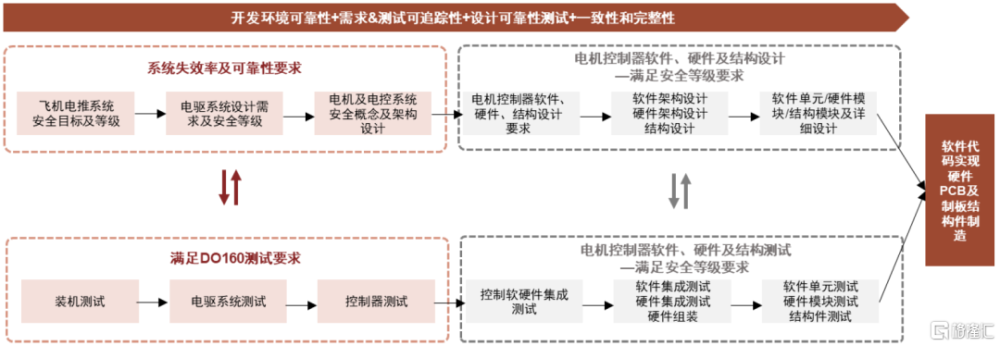
資料來源:中國電源學會CPSS,中金公司研究部
配電系統:繼電器和熔斷器需適配更高電壓平台,產品規格更高。配電系統的核心部件是繼電器和熔斷器,起到开關控制和電路保護的作用。相對於當前主流的400VDC新能源車架構以及傳統飛機270VDC架構,eVTOL在垂直起飛和懸停期間需要使用高功率無刷直流電動機提供每分鐘2300轉到20000轉的風扇轉速來獲得升力,會採用更高電壓等級的電氣架構、平台電壓達到800V以上,相應的高壓直流繼電器、高壓熔斷器需要重新適配高電壓、高功率的需求,帶來產品規格的升級。另一方,產品性能需要滿足eVTOL特殊的工況要求,包括耐用性、抗浪湧能力、抗振動衝擊能力以及小尺寸、輕重量等。
此外,考慮到eVTOL對可靠性、響應精度要求更高,且面臨更復雜的工況環境、需要靈活應對突發事件帶來的電路保護需求,我們認爲或將帶來主動保護特性的激勵熔斷器應用增加。相較於傳統熱熔斷器依靠電流積熱效應熔斷熔絲,激勵熔斷器靠外部信號觸發,比如安全氣囊點火信號等等,炸藥爆炸後,釋放能量推動驅動機構運動,切斷母排(Copper bar),同時,通過內部結構設計、滅弧設計,來熄滅電弧;具備響應速度快、壽命長、支撐更大功率輸出、可依據故障場景觸發等優勢,且不存在與繼電器電流匹配的問題。
圖表12:激勵熔斷器工作原理
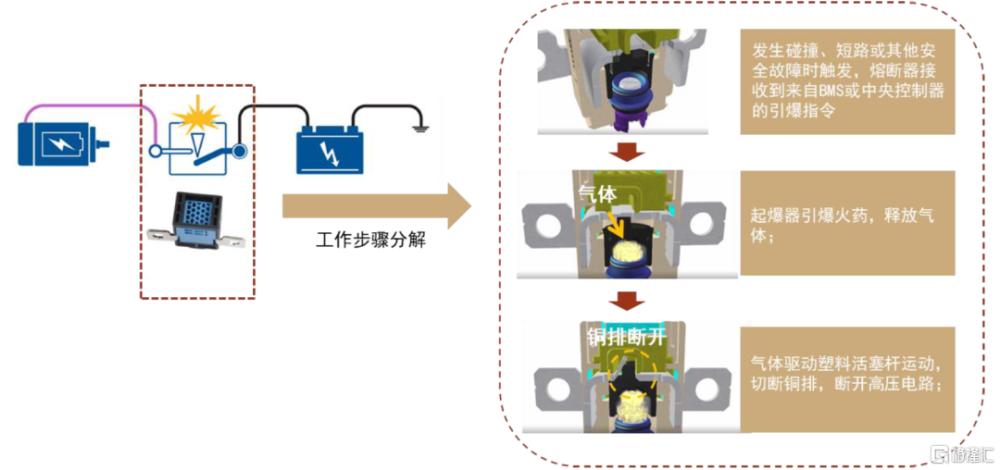
資料來源:Autoliv官網,中金公司研究部
#3 冷卻系統:熱管理爲電推力系統保駕護航
飛行器電機功率較高,在持續大功率的情況下也會產生大量熱量,且如果是涵道構型的eVTOL更會面臨動力系統高溫的問題,而高溫會進一步導致電機內部永磁體的退磁以及電機絕緣構件的有效性,因此散熱就成爲了較爲關鍵的問題。常見的散熱方式主要有風冷和液冷,一般而言,低功率密度的電機適宜採用自然冷卻和強波風冷;中功率密度的電機一般採用液冷,而更高功率密度的電機主要採用混合冷卻系統。
圖表13:eVTOL電機散熱的主要方式
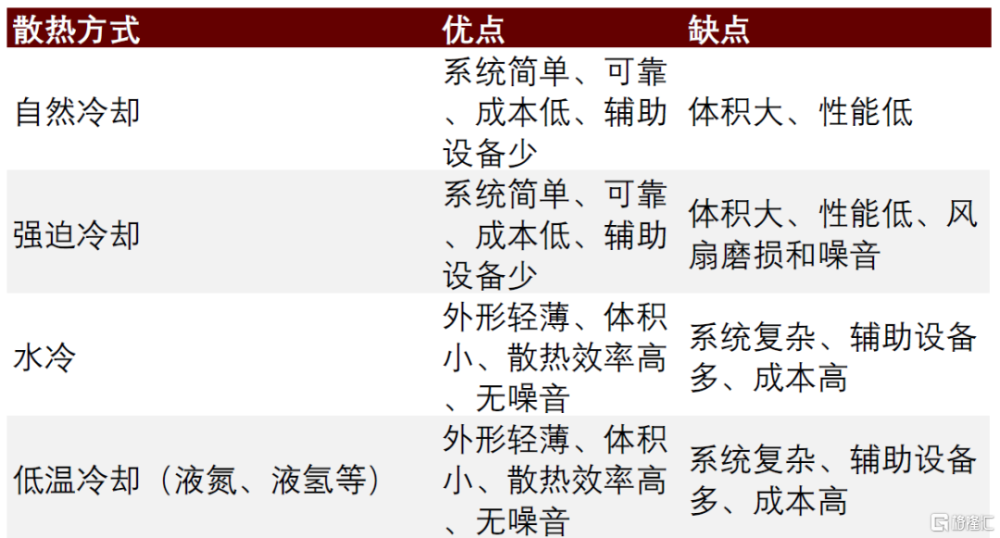
資料來源:張卓然,陸嘉偉,張偉秋,等.飛機電推進系統高效能電機及其驅動控制技術[J/OL].中國電機工程學報[2024-03-30,中金公司研究部
#4 推進器:最終升力機構,結構設計、輕量化、效率及降噪是核心要素
對於一套電動系統而言,其推進效率主要由電池效率、電機效率、推進器效率共同組成,其中電池、電機的效率多爲95~98%,而推進器的效率多爲80-85%,仍有一定提升的空間。大多數的推進器結構都以碳纖維復合材料爲主,碳纖維材料密度較低能實現較好的輕量化,波音787之中50%左右的結構由復合材料制成,小鵬旅行者X2旋翼槳葉也採用碳纖維環氧樹脂基復合材料,提升了結構剛度和輕量化水平。從結構端來看,目前推進器主要分爲兩大類:开放式旋翼以及涵道式風扇。
开放式旋翼:开放式旋翼的技術較爲成熟,國內億航、峰飛、小鵬匯天等多家eVTOL廠商選擇开放式旋翼,但各家的旋翼葉片數量有所不同,例如億航EH216-L(最大載荷250kg)採用8旋翼的雙層雙葉片結構、時的科技E20(有效載重450kg)採用6旋翼的單層五葉片結構。更多的葉片數量能夠提升螺旋槳的升力和效率,但是也會導致更大的噪音和更復雜的機械結構,同時考慮到多數廠商採用碳纖維復合材料多葉片結構也會導致更高的成本,因此葉片數量、大小、構型是在不同應用場景、產品設計性能、成本等多個因素之間最終權衡的結果。
涵道風扇:涵道風扇是若幹葉片被環形涵道包絡而形成的結構,環形涵道相較於开放式旋翼能夠抑制螺旋槳葉片尖端的渦流,產生更高的氣動效率,同時涵道的結構也一定程度上能起到在轉子爆破的適航產生保護效果。涵道風扇可以設計的更加緊湊,在起降空間狹小的場景中應用。Volocopter的Volo Region採用了6個升力旋翼以及2個推進涵道的設計。
圖表14:Volo Region的示意圖(6开放旋翼+2推進涵道)

資料來源:公司官網,中金公司研究部
此外推進器的另一個關鍵問題在於降噪,eVTOL的噪音來源絕大多數是旋翼破空的噪音。雖然eVTOL相較於直升機已有較好的降噪效果,但傳統直升機的其他降噪措施仍然值得eVTOL借鑑。例如螺旋槳的設計(例如葉片數量、槳距結構)、駕駛策略、控制策略等都直接影響噪音水平。舉例來看,根據時的科技,大直徑低轉速的五葉螺旋槳可以有效降低噪音;OVERAIR也提到實現主要降噪功能之一的組件是安裝在飛行器上的4個相對較大、相對緩慢運轉的螺旋槳,每個螺旋槳具有3片復合材料槳葉。
圖表15:eVTOL的降噪策略
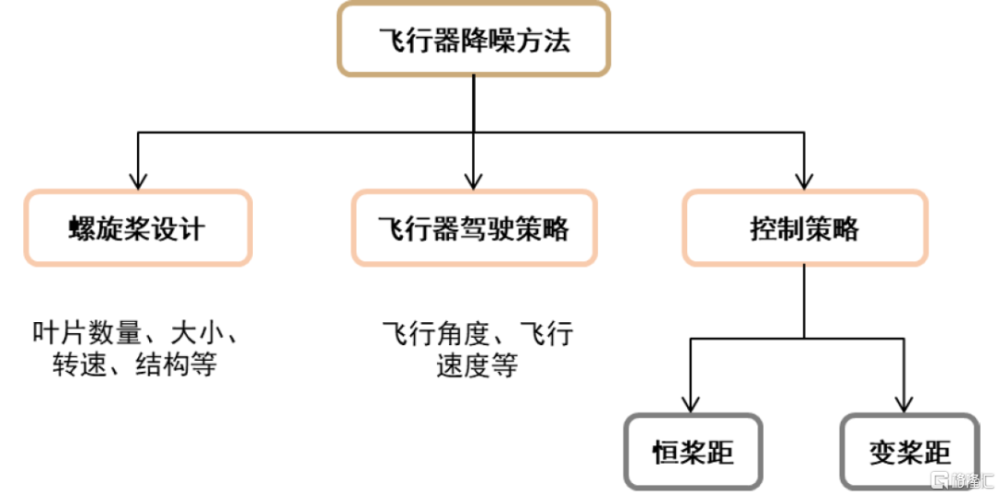
資料來源:An Investigation of Piloting and Flight Control Strategies on Generic eVTOL Noise,Bhaskar Mukherjee etc 2022,中金公司研究部
風險提示
政策支持不及預期:eVTOL產業包括起降站等基礎設施建設、整機及零部件制造、空域管理等信息系統等,環節多、難度大、投入高。且當前eVTOL仍然處於產業發展早期,類似早期的新能源汽車,若政策支支持力度不及預期可能會導致產業發展速度不及預期。
產業化進度不及預期:從供給側來看,eVTOL的飛控技術、綜合航電等仍有一定難度,且飛行器的航程、速度等仍然受制於電池、電機的技術進步,若關鍵技術未有進一步突破可能存在eVTOL產業化進度不及預期的可能性。
注:本文來自中金公司2024年3月31日已經發布的《低空飛行觀察(二):詳解eVTOL需要怎樣的動力系統》,報告分析師:曾韜 S0080518040001,江鵬 S0080523080006,王穎東 S0080522090002,杜懿臻 S0080122070112
標題:eVTOL需要怎樣的動力系統?
地址:https://www.iknowplus.com/post/94858.html