毫米波雷達,最強科普
無线電探測和測距是一種使用電磁無线電波來確定周圍區域物體的範圍、速度和角度的系統或設備。該系統傳輸電磁波信號,該信號被路徑中的物體反射。通過捕獲反射信號並進行一些信號處理,雷達系統可以確定感興趣物體的範圍、速度和角度。RADAR 的這些屬性將它們視爲傳感器,通常稱爲 RADAR 傳感器。
完整的雷達系統包括射頻(RF)組件的發射器(TX)和接收器(RX);用於計時的模擬元件;以及數字組件,例如模數轉換器 ( ADC )、微控制器 ( MCU ) 和數字信號處理器DSP。
即使有了這樣的可用性,RADAR 也沒有在天氣、遙感和衛星以外的任何領域找到應用。主要原因是需要設計一種低成本、低功耗的高精度雷達。
半導體技術的最新改進使得雷達的分立元件更具成本效益和功耗,同時提高了精度和可配置性。在雷達中使用電磁頻譜中的毫米波 ( mmWave ) 等短波長具有更小的天线和其他設備外形尺寸的優勢,這些設備通常將整個雷達系統集成在一個芯片中。這一進步促進了無线傳感領域的應用、研究和發展,並利用毫米波雷達傳感器爲不同領域尋找工程解決方案。
除了雷達之外,還有許多遠程或無线傳感選項,例如攝像頭、光探測和測距(LiDAR)和超聲波,但這些傳感器具有工作範圍限制、環境限制,並且其中一些傳感器價格昂貴。RADAR可以爲他們提供更好的解決方案。此外,各種隱私法限制了相機等常見傳感器的使用。然而,RADAR 缺乏對象分類並且檢測稀疏。
機器學習 (ML) 和人工智能 (AI) 的出現以及新的估計技術和多輸入多輸出 ( MIMO ) 的概念極大地改進了雷達應用,使其可以充當獨立傳感器或補充融合傳感器。限制相機等常見傳感器的使用。另一方面,RADAR 缺乏物體分類,檢測相對稀疏。機器學習 (ML) 和人工智能 (AI) 的出現以及新的估計技術和多輸入多輸出 ( MIMO ) 的概念極大地改進了雷達應用,使其可以充當獨立傳感器或補充融合傳感器。
隨着市場的發展,毫米波雷達的應用範圍已超出汽車領域,逐漸擴展到智慧城市、樓宇自動化、健康監測等行業。Markets and Markets最近發布的數據顯示,到2023年,毫米波POD傳感器的總市場將達到206億美元。車載雷達是這波增長的主要驅動力,
但隨着物聯網(IoT)的發展,醫療保健市場有望成爲驅動毫米波雷達市場的另一個輪子。
我們認爲的一些應用:
一、汽車應用
4D 毫米波雷達,用於高級駕駛輔助系統 (ADAS) 中的多目標跟蹤設備,用於駕駛安全、碰撞檢測和停車輔助。
二、醫療應用
毫米波雷達可以檢測和監控人類手勢、情緒、運動、血液循環和心跳,並提供一定的隱私。
三、機器人應用
用於成像和傳感、物體檢測、導航和視覺。
四、氣象應用
毫米波雷達有助於雲分析、作物分析、輻射測量、GIS 和氣候研究。
五、航空航天和國防
導彈攔截和制導、無人機、機載測距、隱身作战和飛行控制。
六、工業和自動化應用
用於質量控制、裂紋檢測、液體和體積流量檢測、泄漏和材料分類。
七、民用應用
用於空中交通管制系統、低空空間監視、避險預警系統、碎片區或雪區監視、智慧城市、物聯網、智能家居等。
在接下來的文章中,我們將回顧和理解技術方面、應用方面、一些毫米波雷達概念、估計技術和 MIMO 概念。我們還將研究雷達估計 DSP 部分的不同實現平台。
毫米波雷達的分類和優點
毫米波雷達是一種非接觸式傳感器,工作頻段爲 10 毫米 (30 GHz) 至 1 毫米 (300 GHz)。這提供了精確的位置感測、速度和角度,並且可以在不受幹擾的情況下執行。毫米波雷達發射脈衝信號,並根據通過天线陣列接收到的反射來檢測目標。進一步的處理估計到目標的距離、到達角度和相對速度。
目前毫米波雷達主要有3個工作頻段——24GHz毫米波、77GHz毫米波、60GHz毫米波雷達。24GHz 毫米波雷達價格便宜,但帶寬 (250MHz) 較小,限制了應用和精度。77GHz 頻段具有 4GHz 的高帶寬,可提供更高的分辨率/精度,從而可媲美 24Ghz 頻段。具有 7GHz 帶寬的 60GHz 毫米雷達用於高精度短距離應用,還提供了更小的系統設計。60GHz頻段有望成爲智能家居市場和健康監測的主流。
一、毫米波雷達的優點:
1、天线口徑小:波束窄,跟蹤精度高;高分辨力、高抗窄波束幹擾性能;高天线增益;較小的物體檢測。
2、大帶寬:信息率高,目標結構特徵詳細;減少多徑,增強抗幹擾能力;克服相互幹擾;高距離分辨率。
3、高多普勒頻率:對慢速目標、振動目標有良好的檢測識別能力;可以在雪地條件下工作。
4、良好的防消隱性能:適用於最常用的隱形材料。
5、與其他傳感器相比,對灰塵、煙霧和霧等大氣條件的魯棒性更強。
6、不同燈光下工作:雷達可以在強光、炫光或無光下工作。
7、不易受到地面雜波的影響:允許近距離觀察。可以使用毫米波雷達測量低反射率。
8、相同範圍內的精細空間分辨率,毫米波雷達比微波雷達提供更精細的空間分辨率。
二、毫米波雷達的局限性:
視线操作。
受環境中水分、氣體的影響。
受污染環境和物理障礙的影響。
三、毫米波雷達傳感器組件:
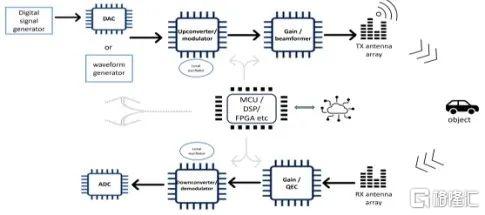
上圖顯示了毫米波雷達傳感器模塊的基本結構,該模塊主要用於所有應用。它們的描述如下:
1、DAC 或波形發生器:
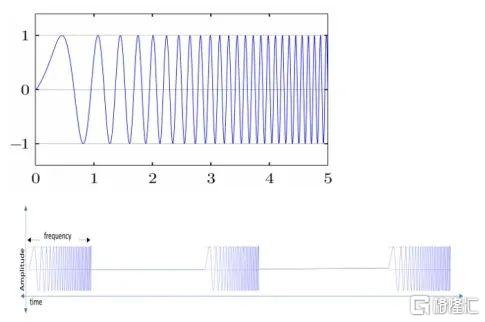
在雷達中,信號以脈衝頻率調制信號的形式傳輸。雷達使用調頻連續波 ( FMCW),這是一種在固定時間段內以已知速率調制的連續變化頻率信號。正常連續波 (CW) 信號缺乏距離和速度計算的標記和時間估計,而在 FMCW 中,即使很小的時間差也會產生用於估計的相移。而脈動信號有助於同一 TX 和 RX 陣列上的離散信號產生更清晰的回聲。該脈衝的長度、重復時間和間隙定義了毫米波雷達的應用和範圍。同時,它還可以降低雷達的功耗,有助於控制幹擾和抗幹擾。
由於上述特性,雷達使用通常稱爲线性調頻信號的信號。线性調頻信號是調頻短長度信號,其中頻率遵循信號頻率的遞增或遞減順序。它是離散傳輸的。在某些應用中,可以使用雙極格雷碼進行傳輸,以獲得更好的相關性和分辨率。
在雷達中,對於上述所需信號,可以使用某些波形發生器,但在這個數字世界中,更合適的方法是從數模轉換器(DAC)生成信號,其中任何類型的信號都可以以數字形式存儲爲查找表。然後可以使用正確的採樣率 DAC 以所需的速率進行傳輸。該傳輸的增益、信噪比 (SNR)、數據速率可以通過 MCU、FPGA(現場可編程門陣列)和 DSP 等 RADAR 中央處理系統輕松控制,以便通過以下方式對信號進行微調和更多控制配置 DAC。如今,DAC 可提供高數據和採樣率並支持多通道,因此同一設備可用於多次傳輸。
2、變頻器:
毫米波雷達使用30Ghz ~ 300Ghz範圍內的頻率,這在最高DAC採樣率下無法實現,並且成本非常高。爲此,普通 DAC 後面可以跟隨一個上變頻器,該上變頻器將使用本地振蕩器生成的載波進行 FMCW 調制,使信號處於毫米波範圍內,並通過調制提供噪聲改善。這提供了低成本的解決方案以及更多的控制和多種傳輸選項,因爲這些振蕩器、調制和上變頻器可以通過雷達的中央處理系統進行配置,從而使雷達傳感器可以根據應用和範圍進行配置。
以下是用於不同測量目的的一些調制模式:
鋸齒調制:範圍相對較大(最大距離),多普勒頻率的影響可以忽略不計。
三角調制:更好的相位分辨率。
方波調制:在物體內精確估計距離,但距離較短。
步進調制:用於幹涉測量。
正弦調制:大多易於生產且用途廣泛。
類似地,在接收器側是下變頻器或解調器,使用相同的本地頻率從載波中提取信息信號。結果,我們得到了原始反射信號,並根據回波進行了變化以進行估計。由於頻率較小,該估計在計算和處理上變得更容易。同樣,這些都是可配置的設備,並且全部位於同一雷達傳感器上,使我們可以選擇優化傳感器調整和噪聲改善。許多變頻器都提供低成本的最佳解決方案。
3、波束形成器:
在毫米波雷達中,爲了獲得良好的估計,我們需要准確且已知的傳輸方向、視場或目標檢測場,並且可以是 3D 空間中的任意大小。有必要限制所需和目標應用程序中的空間,通常稱爲點雲框架。因此,有必要以特定的功率在特定的方向上傳輸我們的线性調頻信號。波束形成器設備用於此目的。
如今,Beamformer 提供多通道支持,以便我們可以以各種傳輸角度傳輸多個线性調頻信號。這有助於掃描目標點雲幀。波束形成器可以產生旁瓣較小的窄波束,確保提高信噪比並改善信號幹擾比。一個頻段中的窄波束可減少對其他頻段的幹擾並提高雷達估計的分辨率。
此外,波束形成器還有助於控制雷達的視場和控制傳輸相位,以實現多目標檢測/分辨率。類似的波束形成器可以集成在 RX 側,以便根據 TX 捕獲更多調諧回波,從而降低噪聲。它們確保回波信號所需的增益和校正。可用的波束形成器還可通過雷達的中央處理系統進行配置,以實現雷達傳感器的更受控制和更廣泛的應用。
3、天线陣列:
天线陣列是連接到多個天线的單個 TX 或 RX,用作無线電波的單個天线。在毫米波雷達中,該天线陣列以相移方式連接,以發射或接收不同的移相器线性調頻信號或回波信號。這有助於控制雷達分辨率。多天线還生產多 TX 系統,用於改進控制功率波束形成和多目標檢測的雷達功能。這構成了毫米波雷達 MIMO 實現的基礎,我們將在以下部分中對其進行回顧。所需的相控陣需要在 PCB(印刷電路板)上進行適當的布局和制造,以實現毫米波頻段的諧振匹配和高接收能力。作爲毫米波,該設計需要 PCB 上佔用空間更小的天线,這是毫米波雷達的優勢之一。
4、模數轉換器 (ADC):
RADAR RX 側的最後部分形成了 ADC,有助於將线性調頻回波的模擬形式轉換爲數字部分,可由 MCU、DSP 和 FPGA 等數字系統進一步處理。它採用數字格式,有助於實現降噪邏輯、信號處理和計算。ADC 的分辨率控制雷達估計計算的准確性和量化。ADC 分辨率可以定義雷達傳感器應用的範圍,並且它們會引入量化噪聲。目前,可用的 ADC具有更高的分辨率和數據接口速率,可實現雷達的實時高速處理。
4、雷達處理系統:
雷達處理系統涉及對識別物體的距離、速度、方位角和角度進行處理和計算。雷達中使用了多種估計技術,例如過零、希爾伯特變換以及最常用的用於相位和角度估計的快速傅立葉變換(FFT)。最大似然估計、距離 FFT和自相關用於距離估計。基於 MIMO 的多普勒 FFT 和相關器用於速度估計。估計的起點從尋找發射的线性調頻脈衝和回波线性調頻脈衝之間的相似性或關系开始,這通常通過不同的相關算法或通過 TX 和 RX 信號的混頻/相乘以獲得中頻( IF) 來完成。它直接顯示 TX 和 RX 信號之間的關系,並通過 FFT 等不同算法進一步處理。
處理通常涉及使用指數、浮點或更大尺寸數據的許多线性和二次運算。這些可能是計算密集型的,並且需要更多的處理才能獲得更高的准確性。除此之外,不同的環境或設計限制因素可能會引入錯誤估計或噪聲,爲此需要人工智能/機器學習和人工神經網絡 ( ANN)的幫助。這些算法經過訓練和優化,以進一步改進雷達估計和預測。這改善了毫米波雷達的整體應用和範圍。但這些算法也是多層的,計算復雜。
該系統的最後一部分可以是數據庫、存儲庫、基站或雲、中央服務器、規則或基於決策的模型或多傳感器融合網絡等平台。這些可以幫助基於雲的雷達遠程處理應用、多節點傳感器融合網絡、遠程或存儲數據庫以及物聯網網絡,從而將雷達的範圍從本地應用擴展到全球和多域。這些是當前技術的一些基本需求。
有多種平台選項可用於擁有智能自適應嵌入式雷達處理系統,該系統利用先進且普遍的機器學習和人工智能系統架構設計。以下是一些選項:
(1)微控制器 (MCU):微控制器是具有不同外設和內存的處理器系統,它們組合使用來連接和配置毫米波雷達系統的不同組件。高頻核心有助於更快地計算估計算法和 AI/ML 邏輯。此外,它們還支持任何編程框架,如 C/C++、Scala、Java、Python 或任何其他新語言,可實現快速設計空間探索和運行應用程序。在微控制器上運行更智能的操作系統 (OS) 軟件爲雷達系統提供了完整的嵌入式設備定義。在管道中已經有許多非雷達進程的微控制器上運行計算密集型雷達處理是一個瓶頸。它們在增加運行頻率和 CPU 核心數量方面受到限制。此外,當多雷達傳感器設備、組件或定制實現存在時,它們也缺乏。它們不是密集型 AI/ML 代碼的最佳平台。因此,MCU會限制雷達的應用範圍。
(2)GPU:與 CPU 相比,圖形處理單元 (GPU) 是更簡單的處理單元,但具有更多內核,可實現廣泛的並行處理。爲計算和處理密集型算法提供高吞吐量,因此它們最適合 AI/ML 代碼。此外,它們非常適合雷達和人工智能/機器學習經常需要的高浮點計算。然而,GPU 需要 CUDA 和 OpenCL 等語言,开發環境的靈活性較差。此外,它們缺乏外圍設備和獨立核心,限制了智能操作系統在其上的運行。通常,它們與微控制器結合使用,其中 MCU 充當雷達傳感器配置、中央單元和操作系統平台,GPU 充當雷達和 AI/ML 估計和處理邏輯的卸載引擎。
(3)TPU:TensorFlow 處理單元 (TPU) 經過自下而上的設計,可以更快地執行應用程序。它們執行快速密集向量和矩陣。因此,適合以矩陣計算爲主的應用。這意味着與 CPU 和 GPU 相比,它們的靈活性較低。當計算模型基於 TensorFlow 時最好使用它們。因此,他們無法處理定制雷達傳感器設計並限制雷達應用。
(4)DSP:數字信號處理器是具有優化架構的MCU,用於信號處理和計算,處理復雜和高運算。它們提供了开發環境的靈活性以及 CPU 和 GPU 之間的計算吞吐量。它們的計算准確、快速,並且具有重新配置的靈活性。他們可以連接和配置雷達系統。但由於編程復雜(因爲計算是軟件驅動的)、功耗較高、成本高、DSP 內缺乏可移植性,並且需要熟練的工程師,因此它們僅限於雷達應用範圍。
(5)FPGA(現場可編程門陣列)是可配置和可重新編程的芯片,用於實現膠合邏輯和自定義功能。它們構成了基於雷達的定制應用解決方案的強大競爭者。FPGA 可以設計用於多核並行和異構計算以實現高吞吐量。從AI/ML到DSP的算法設計都可以在FPGA上編程,硬件驅動,更可靠。它們爲不同的雷達組件提供定制和標准接口,爲定制雷達傳感器的設計和應用提供了巨大的幫助。此外,他們還爲您的雷達傳感器提供驗證和驗證平台。FPGA 具有軟 MCU 甚至硬 MCU,例如片上系統(SoC FPGA),它爲智能操作系統提供平台,並且可以像普通 MCU 一樣使用任何語言進行編程。這就是爲什么越來越多地探索 FPGA 來爲毫米波雷達提供更多支持、开發和研究活動。
FPGA具有硬DSP乘法器,但相對於DSP來說數量有限,因此浮點計算受到限制。優化的邏輯設計和流水线、將浮點轉換爲整數運算可以提供與 DSP 同等的精度。它們可能缺乏 CPU 頻率、MCU 核心,但它們卸載和增加外設/接口(標准和定制)、進程密集型任務的並行流水线的能力超越了這一限制。他們總能將軟件瓶頸流程轉化爲硬邏輯。
此外,它們還可以連接外部 MCU、DSP 和 GPU,以獲得更大的靈活性。FPGA需要專門的工程師資源和HDL語言,如Verilog /VHDL。它們現在支持嵌入式工程師使用 HLS 等基於 C 的編程,但優化設計需要 FPGA 工程師。除了缺點之外,它們不斷下降的成本和不同的可用性已經增加了雷達的研究和开發,以及包括物聯網、人工智能/機器學習和航空航天在內的所有現代技術的研究和开發。
除了多組件雷達傳感器之外,市場上還提供了許多單芯片或單模塊雷達傳感器解決方案,並探索了更快的基於雷達的產品开發,在這裏我們就不一一舉例了。
四、毫米波雷達估計:
毫米波雷達的基本估計是從 TX 發送信號脈衝开始,然後在 RX 側接收其回波。計算或分析 TX 和 RX 信號之間的關系有助於估計目標物體的距離、速度和方位角/角度。首先,我們發送一個稱爲线性調頻信號的 FMCW 信號脈衝,爲了一般性,我們將其稱爲正弦調頻线性調頻信號,如圖 5.a 所示。這提供了良好的降噪效果和更好的接收質量。爲了獲得更好的抗噪性,可以實現互補的 golay 信號,但目前這超出了本文的範圍。
因此,請考慮圖 5 中的线性調頻脈衝。如果我們使頻率調制與時間呈线性關系並繪制頻率與時間的關系,我們會得到如圖 5.b 所示的圖,X 圖顯示脈衝的時間周期t,Y 圖顯示线性調頻的帶寬B(最大頻率 - 最小頻率)。斜率S顯示頻率的變化率,甚至功率譜隨時間的變化。當线性調頻脈衝穿過空間並回波至 RX 時,它會獲得相移和幅度變化,從而保持线性調頻脈衝頻率线性度相同。因此,我們可以在圖 5.c. 中看到 RX 线性調頻脈衝,其中 TX 和 RX 线性調頻脈衝之間的時間t之差是時間差或线性調頻脈衝回顯所需的時間。不同距離的物體所花費的時間不同。我們可以定義與信號相位φ的時間關系如下。
φ = 2πfc --- 方程 1
現在,讓物體位於距離d處,因此线性調頻脈衝將在空間中穿越2d距離,並且電磁波的速度被認爲等於光速c。我們可以說tc所花費的時間如下。
tc = 2d / c --- 方程 2
利用式1和式2,我們可以推導出相位關系如下,其中λ是chirp的波長。
φ = 4πd / λ --- 式 3
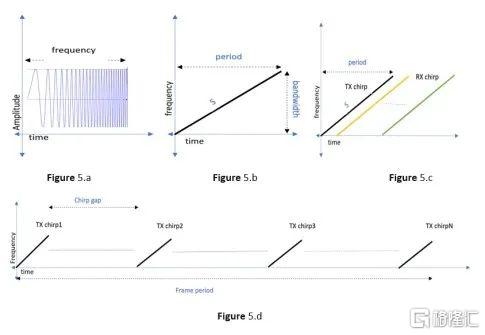
因此,方程 3 將相位差定義爲與距離d成线性關系,這意味着距離越遠,相移越大。因此,线性調頻脈衝的長度或時間周期t和帶寬B將定義用於距離估計的雷達所覆蓋的最大距離,更大的线性調頻脈衝長度意味着可以可靠地覆蓋更遠的距離。現在,這些线性調頻脈衝在tg的間隙中定期傳輸(圖 5.d.),每個线性調頻脈衝可用於 3D 空間的特定區域,因此對於點雲幀,將需要N (线性調頻脈衝數)。线性調頻間隙tg取決於我們的幀速率、雷達處理系統處理的數據速率,並且應該最小以適應先前 TX 线性調頻的所有回聲线性調頻。多 TX 天线可以產生多種线性調頻信號,用於不同目的和多目標檢測。
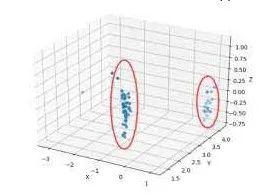
1、範圍估計:
根據物距,我們得到相移线性調頻版本。如果對 TX 和 RX 信號進行倍頻,我們會得到 IF 音調信號,該信號與接收信號的相位或兩個信號的時間重疊直接相關。從圖 6.a. 中,我們可以看到創建的 IF 音調。保持不同距離的多個目標物體會產生不同的相移回波信號,並最終產生不同的中頻音,如圖 6.b 所示。該特性可用於根據以下等式進行範圍估計。
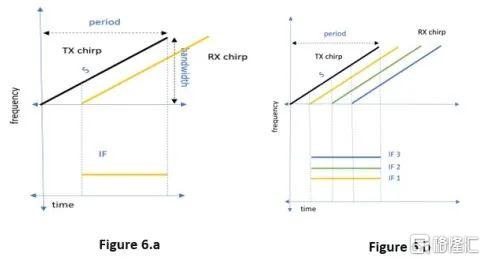
d = c/2Stc --- 方程 4
其中S是頻率圖的斜率。帶寬B的給出爲B = Stc,因此,上述等式考慮了小增量距離Δd
Δd = c / 2B --- 方程 5
從上式可以清楚地看出,小增量d或距離的最小分辨率是倒數B的函數,增加帶寬將增加距離分辨率。考慮到毫米波雷達的 Ghz 操作,距離分辨率通常爲釐米級。相控天线陣列提供多中頻音調,可進一步用於基於 AI/ML 的代碼,以提高雷達的距離分辨率。
2、速度估計:
對於速度估計,經常使用一系列多线性調頻傳輸。假設對於靜止物體,背靠背线性調頻脈衝產生幾乎相同的中頻音。讓我們將eqn2 中的d替換爲 eqn3 中的 d。還考慮速度v代替c,重新排列後,我們得到的結果方程是:
v = λ φ /4 πtc --- eqn 6
速度Δv的微小變化與相位Δφ的變化有關,對於多個线性調頻,如果物體處於運動狀態,它會獲得相同頻率的 IF 音調,但發生相移,並且該相移與物體的速度直接相關。同樣,該特性可用於估計物體的速度。如果多個具有不同速度的移動物體與雷達的距離相同,則該方法將失敗。由於它們距離相同,因此我們將具有相同的 IF 頻率。該雷達系統必須傳輸兩個以上的线性調頻脈衝,例如一組N個等間隔的线性調頻脈衝。這就是相控天线陣發揮作用的地方。由於其排列方式,每個天线都會發送具有小相移的連續线性調頻信號。這最終使 RX 處的回波信號的相位出現變化,這有助於多物體速度估計。
根據 eqn6,我們可以說速度估計與時間成反比,在多個线性調頻的情況下,它與线性調頻之間的時間 tg相關。由於信號v ~ λ /4tc的周期性,可以通過減少线性調頻之間的時間來完成 Vmax 估計,這可以稱爲速度分辨率。如果考慮多個线性調頻脈衝(例如一幀线性調頻脈衝)的時間,則速度分辨率取決於幀長度tf。具有基於 AI/ML 的代碼的相控天线 RX 陣列可以進一步提高雷達的速度分辨率。
3、角度估計:
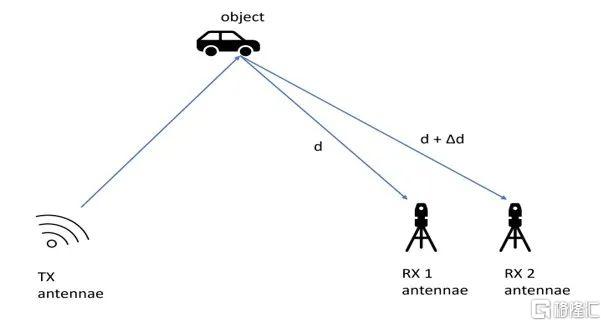
對於角度估計,多個天线或天线陣列是最重要的。從圖 7 中,我們可以看到一個 TX 天线和 2 個 RX 天线組成的系統。發射的线性調頻脈衝將回傳到兩個 RX,但它們所經過的距離相差Δd。假設兩個天线之間的距離爲l,通過三角函數,我們可以說Δd = lsinϴ,其中ϴ是到達角。距離的變化會導致每個接收器處的回波信號發生相位變化。這些特性可以被研究並用於角度估計。
讓我們替換eqn3 中的Δd = lsinϴ並重新排列以獲得ϴ 的方程,我們得到
ϴ = sin -1 (λ φ / 2 πl) --- eqn 7
這近似認爲Δϴ的變化與相位變化Δφ是非线性的,但考慮到小角度sinϴ ~ ϴ,上述關系變爲线性,因此可用於角度估計。現在對於ϴmax,只有在λ φ / 2 πl =1時才會出現最大視場角,理論上最大視場角爲 180 度或π,取φ = π我們得到l = λ / 2。這定義了最佳間距天线之間。
對於角度分辨率或兩個物體之間的最小角度間隔估計,我們可以將方程 7 重寫爲ϴres = λ /Nlcosϴ並考慮l = λ / 2,我們得到ϴres = 2/N 。這裏,N是RX天线的數量。如上所述,角度分辨率與天线數量成反比。天线越多,角度估計就越好。但增加 RX 天线的數量可能會限制某些雷達傳感器設計。爲此,利用 MIMO 概念進一步增強雷達應用。
五、多輸入多輸出雷達:
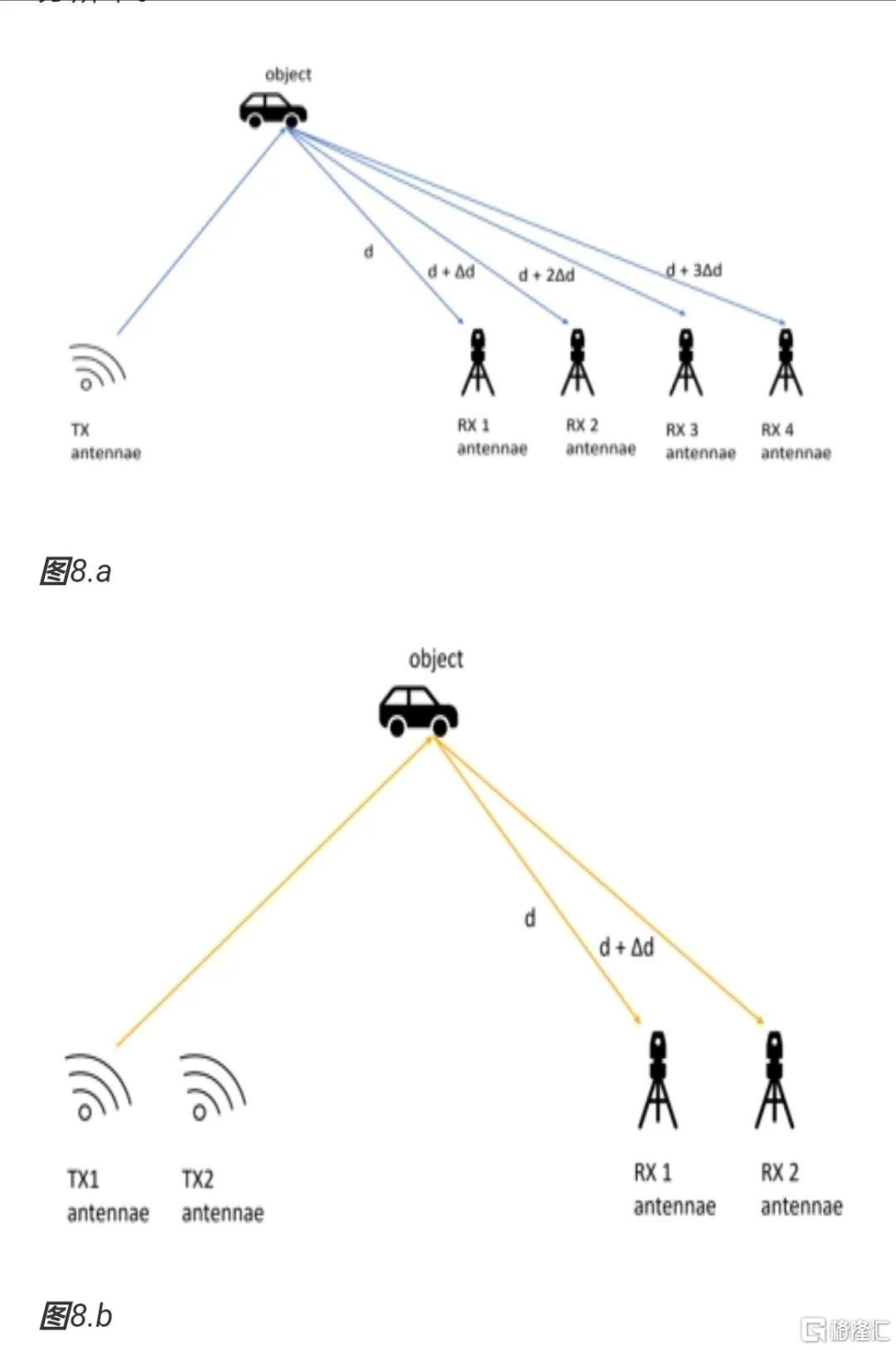
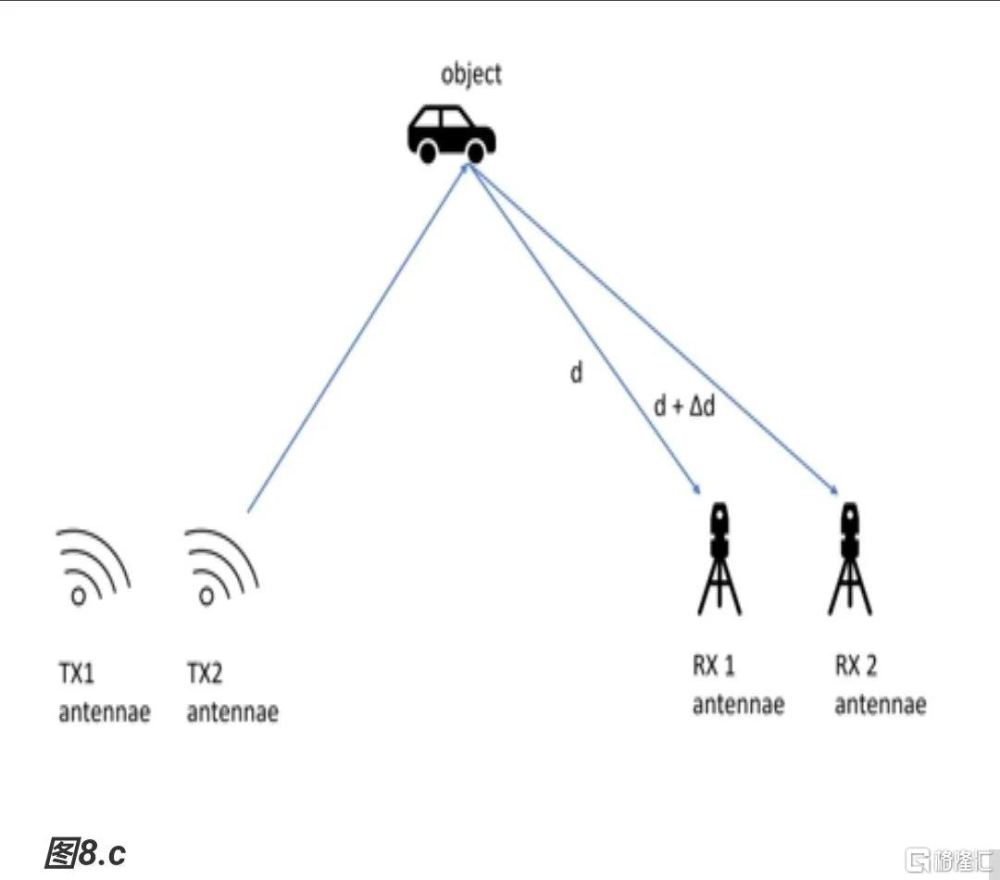
MIMO雷達系統是一種新穎的雷達方法,其中MIMO代表多輸入多輸出。它是一個在 RX 和 TX 側都有多個天线的系統。每個發射天线獨立於其他發射天线輻射任意波形。每個接收天线都可以接收這些信號。考慮到我們想要提高角度分辨率,因此我們實現了 4 個 RX 天线,如圖 8 所示。這裏,一根 TX 天线發射信號,四根 RX 天线接收线性調頻信號。
通過額外引入另一個 TX 天线可以得到類似的實現。在此設置中,第一個 TX 1 進行傳輸,兩個 RX 天线進行接收,如圖 8.b 所示。下一個 TX 2 進行傳輸,兩個 RX 天线進行接收,如圖 8.c 所示。這種傳輸有效地視爲4RX天线;因此這種設置被稱爲 4 虛擬天线 (2TX x 2RX) 系統。利用這一點,我們可以用更少的物理天线來提高角度估計和角度分辨率。
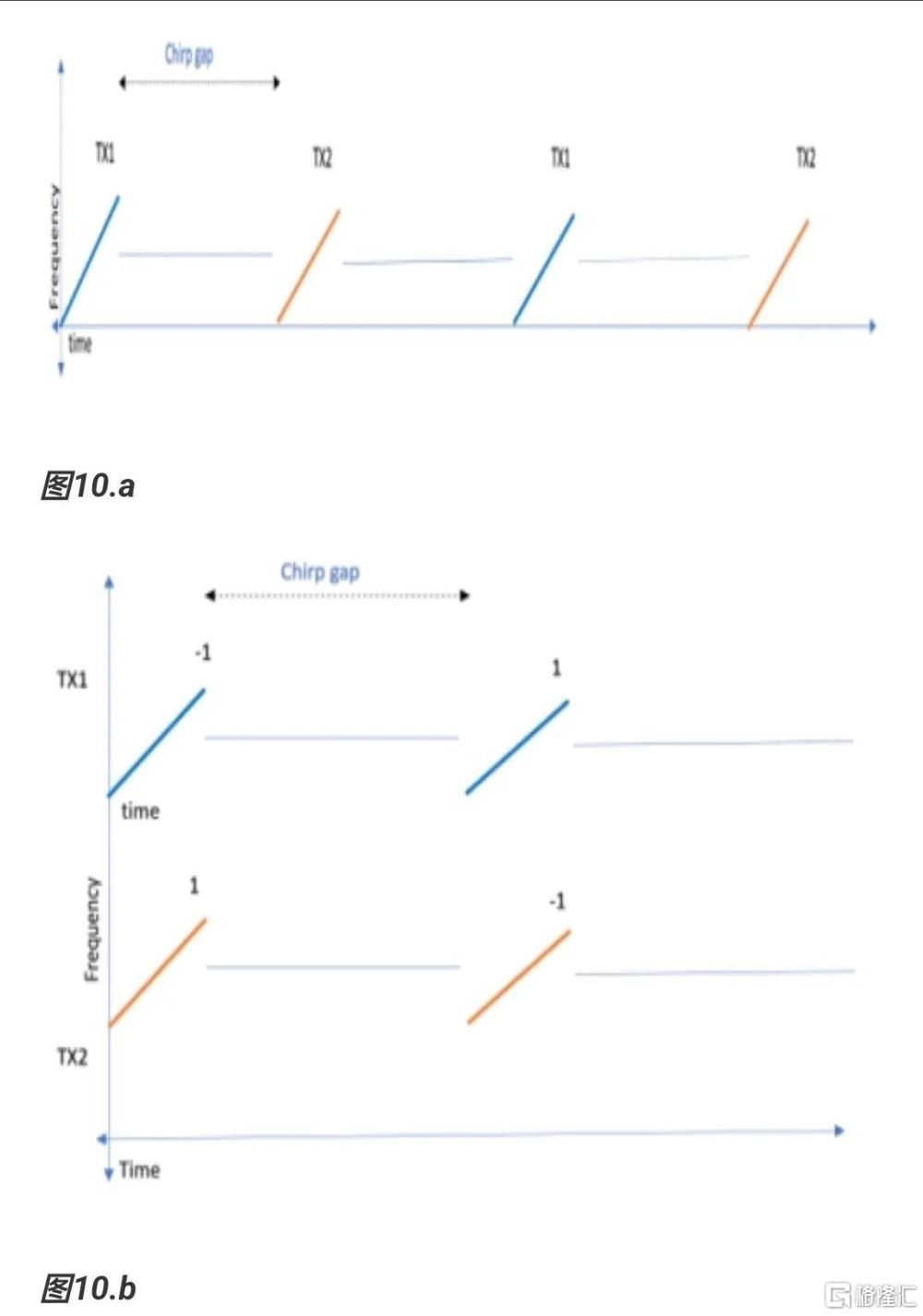
在 MIMO 中,TX 中的线性調頻脈衝傳輸通常採用不同的方法。其中一種方法是TDM(時分復用)。在此,連續的多個线性調頻脈衝被發送,但這些线性調頻脈衝是時間共享的,被一一分配給每個TX(參見圖9.a)。這種方法更容易實現,但沒有充分利用傳感器的能力,並且功耗較低。其他方法涉及 BPSK 或二進制相移。這裏有兩個 TX,如圖 10.b 所示。同時傳輸,但保持 180 度相對相移。考慮+1chirp -1chirp 或空間分離的chirp。這可以提高傳感器的利用率,但對於某些應用,它會增加功耗。
MIMO 概念與現代 ANN 和 AI 算法的結合使雷達的使用超越了傳統應用,這是研究和开發的趨勢。毫無疑問,這推動了毫米波雷達的更廣泛應用。
結論:
在上述綜述中,我們探討了毫米波雷達傳感器的概念、其基本組成、應用範圍以及研發領域。毫米波雷達傳感器與其他傳感器相比具有顯着的優勢,使其成爲各個領域的理想工程解決方案。本文討論了雷達估計的關鍵流程和概念、AI/ML 的集成範圍以及帶有毫米波雷達傳感器的物聯網,以實現現代技術的使用和增強(無論是獨立還是融合)。毫米波雷達技術的未來充滿希望,具有充足的增長和擴展空間。未來的進步可能會帶來更小、適應性更強且更具成本效益的工業毫米波雷達系統。
標題:毫米波雷達,最強科普
地址:https://www.iknowplus.com/post/90292.html







